The second version of the Universal Radio Controllers evolves several features of its predecessor and has additional Computer Aided Transceiver (CAT) capabilities.
Other than the new CAT feature, the notable changes from the V1 edition are:
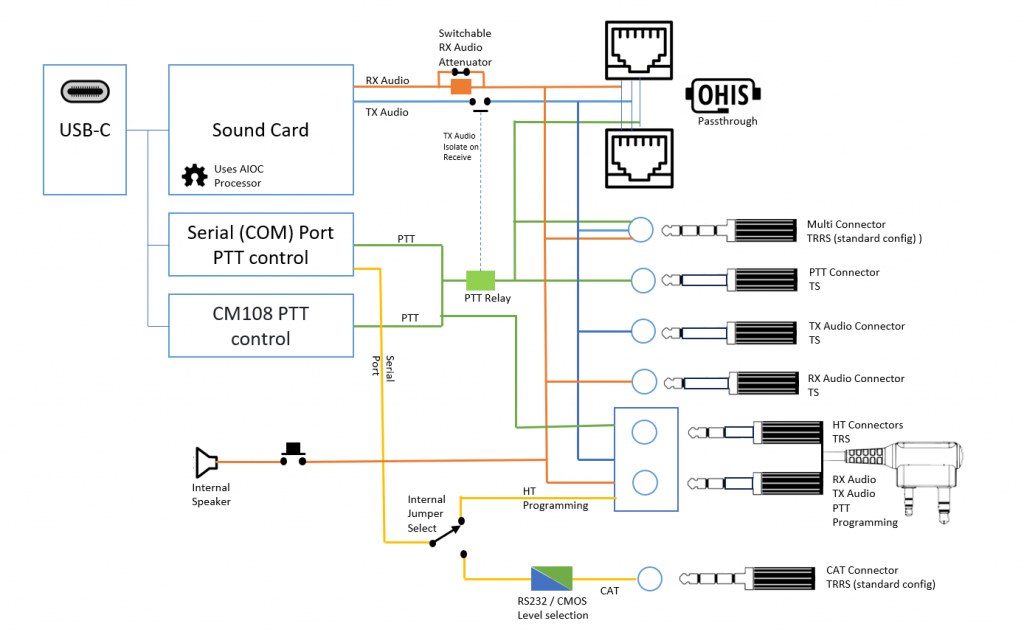
- Hardware relay for PTT for maximum versatility and reliability.
- TX audio isolation during receive (the mic line has no load so is fully passive)
- An attenuation setting for radios that have particularly loud RX audio, to avoid overloading the sound card input.
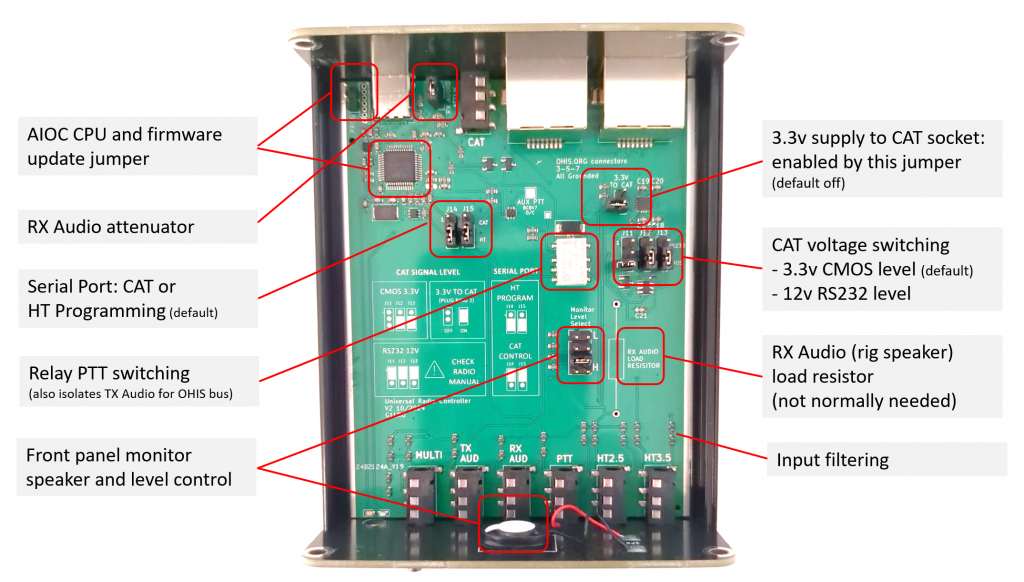
Jumper Configuration
Several functions in the controller are manipulated by internal jumpers. The unit is easily accessible to change jumper settings for a required radio configuration. The following items require jumper settings:
- Set serial port to the CAT port or for programming HTs (default is HT programming)
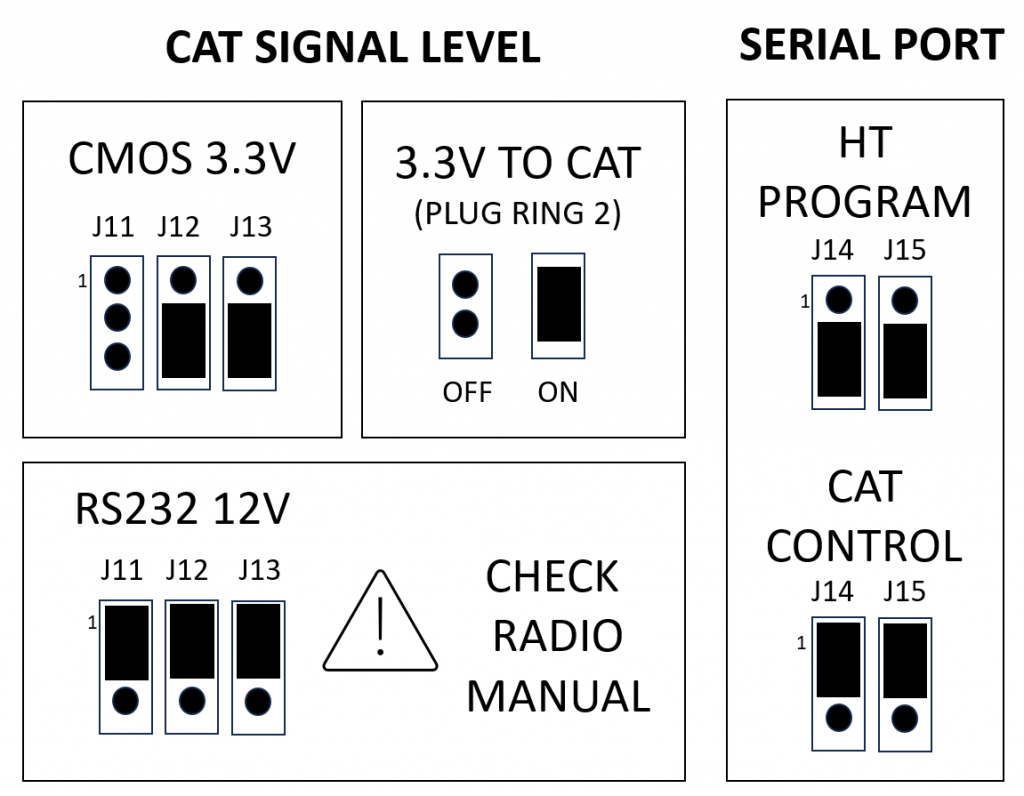
- Enable the 3.3 supply to the CAT (default is disabled)
- Switch CAT levels to CMOS 3.3v or RS232 12v (defaut is 3.3v – be very careful with this setting)
- Change the output level of the front-panel speaker
- Adjust the attenuation for RX audio (default is not attenuated)
- There is a jumper to enable firmware updates to the AIOC processor, only use this for programming (units are pre-loaded and tested)
CAT Connection
The connection to the radio is by a TRRS 3.5mm Jack wired:
- Tip: TX Data from the controller -> RX Data on the radio
- Ring 1: RX Data on the controller <- TX Data from the radio
- Ring 2: A 3.3v CAT device supply line (by default this is not jumper-enabled)
- Sleeve: Ground
There appears to be a standard around this plug configuration so cables from other vendors may work.
About CAT and DATA modes
Software that may be called a CAT program allows a radio to be controlled through the PC. Changes made on the radio through user interactions on the CAT Program are (generally) shown on the PC’s screen.
The functionality of CAT equipment (software & interface) depends on the radio and what features the software writers included in the CAT software. Modern radio systems do have more CAT functionality
If you run a logging program that supports CAT, then that software may take advantage of the CAT system by retrieving information from the radio to help fill in log details, such as the frequency that the contact was made.
CAT is also useful on many radios where there are many sub-menus in the radios menu system, and many of the sub-menu items can be easily changed via the PC. On many HF radios, the CAT system is also used to program the memories on the radio, but you would need to use appropriate programming software.
A CAT interface does not receive or transmit any DATA mode, that is the purpose of a DATA interface. Although, both may be used at the same time with the correct CAT Equipment.
DATA modes, and getting audio to and from the PC is the function of a DATA interface. A completely different thing but it is easier and more useful when CAT and DATA are used at the same time.
The Universal Radio Controller can provide access to DATA modes thorough Frequency-Shift Keying (FSK), Audio FSK (AFSK) with a CAT interface with its own sound card so only one unit is required.